5.2 행렬
행렬은 수를 사각형의 형태로 행과 열을 맞춰 배열한 테이블이다.
2 x 3 행렬은 다음과 같이 2행 3열의 형태이다.
$$\begin{bmatrix} a & b & c \\ d & e & f \end{bmatrix}$$
행렬에서 2차원 백터는 열백터와 행벡터로 표현된다.
| 열벡터 | 행벡터 |
| $$ A = \begin{bmatrix} x & y \end{bmatrix} $$ | $$B= \begin{bmatrix} x \\ y \end{bmatrix} $$ |
정방행렬은 행과 열이 크기가 같은 행렬이다.
선형 변환은 정방행렬을 사용한다. 선형함수 𝑓(𝑥,𝑦)=(𝑎𝑥+𝑏𝑦,𝑐𝑥+𝑑𝑦) 에 대응하는 행렬은 다음과 같다.
| 선형함수 𝑓(𝑥,𝑦)=(𝑎𝑥+𝑏𝑦,𝑐𝑥+𝑑𝑦) 에 대응하는 행렬 | A 를 행벡터와 열벡터로 분석 |
| $$A = \begin{bmatrix} a & b \\ c & d \end{bmatrix} $$ | 첫번째 행벡터 $A_{row1}$ 은 (a,b) 두번째 행벡터 $A_{row2}$ 은 (c,d) 첫번째 열벡터 $A_{col1}$ 은 (a,c) 두번째 열벡터 $A_{col2}$ 은 (b,d) |
행렬과 행렬의 덧셈
행렬의 크기가 같은 경우에만 성립된다.
같은 위치의 원소끼리 더한다.
$$ A + B = \begin{bmatrix} a & b \\ c & d \end{bmatrix} + \begin{bmatrix} e & f \\ g & h \end{bmatrix} \ = \begin{bmatrix}a + e & b + f \\c + g & d + h\end{bmatrix}$$
행렬과 스칼라 곱셈
행렬의 모든 원소에 스칼라를 곱한다.
$$ k \cdot A = k \cdot \begin{bmatrix} a & b \\c & d \end{bmatrix} = \begin{bmatrix} {k \cdot a} & {k \cdot b} \\ {k \cdot c} & {k \cdot d} \end{bmatrix} $$
행렬의 전치 (Transpose of a matrix)
첨자 T 로 표시한다.
행과 열을 바꾸는 작업
$${\begin{bmatrix}a & d \\b & e \\ c &f \end{bmatrix}}^T= \begin{bmatrix}a &b&c\\d&e&f\end{bmatrix} $$
정방행렬의 전치 연산은 대각 정보는 그대로 유지되고 나머지 원소가 대각 성분을 중심으로 대칭된 행렬을 만듬
$${\begin{bmatrix}a & c \\b & d \end{bmatrix}}^T= \begin{bmatrix}a &b\\c&d\end{bmatrix} $$
행렬과 행렬의 곱셈
행렬의 곱셈은 앞에 위치한 행렬의 행벡터아 뒤에 위치한 행렬의 열벡터를 각각 곱하는 방식으로 진행된다.

| 행렬 곱셈의 성질 | |
| 교환법칙이 성립하지 않는다 | $A\cdot B \neq B \cdot A$ |
| 결합법칙을 만족한다 | $(A\cdot B)\cdot C = A \cdot{B \cdot C}$ |
| 분배법칙을 만족한다 | $A(B+C)=AB+AC$ $(B+C)A=BA+CA$ |
| 전치한 결과는 순서를 바꾼 후 각각 전치한 곱과 결과가 동일하다 | $(A\cdot B)^T= B^T \cdot A^T$ |
| 0의 곱셈성질 | $0\cdot A=0$ , $A\cdot 0=0$ |
| 차원의 성질 | 첫 번째 행렬의 열의 개수가 두 번째 행렬의 행의 개수와 동일해야 한다. $m \cdot n $ 행렬과 $ n \cdot k $ 행렬의 곱은 $m\cdot k$ 행렬이다. |
2차원 벡터의 선형변환 행렬
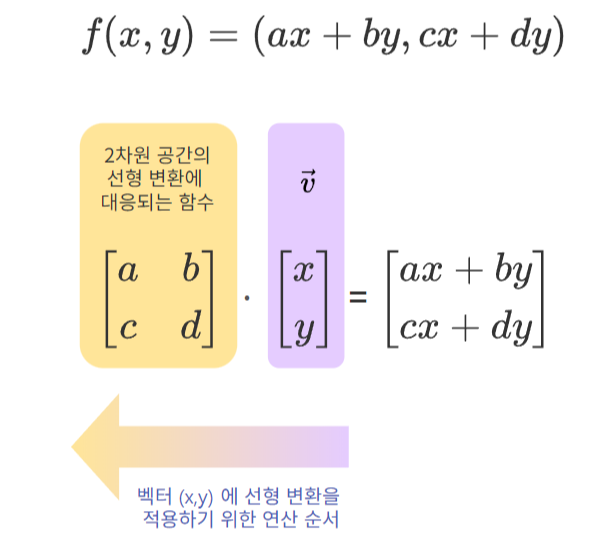
a b c d 네개로 구성된 2x2 정방행렬과 2차원 벡터(x,y)를 열벡터로 설정한 두 행렬의 곱은 선형변환 $f(x,y)=(ax+by,cx+dy)$와 동일하다
a b c d 네개로 구성된 2x2 정방행렬은 2차원 공간의 선형변환에 대응되는 함수를 의미한다.
벡터에 선형 변환을 적용하기 위한 연산 순서는 오른쪽에서 왼쪽 방향으로 이뤄짐을 알 수 있다.
벡터$\vec v$ 에 선형 변환을 나타내는 정방행렬 A,B 를 순서대로 연산하여 벡터 $\vec v$ 가 $\vec w$로 변환되는 과정은 다음 행렬곱으로 표현 할 수 있다.
$B \cdot A \cdot \vec v $
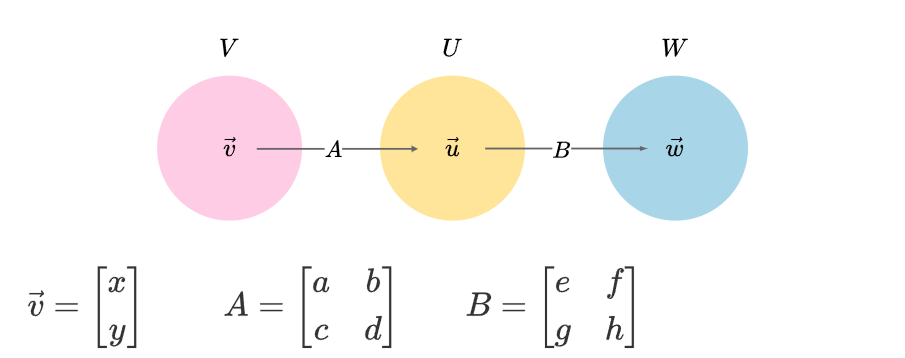
$$\vec w = \begin{bmatrix}e & f \\g & h\end{bmatrix} \cdot \begin{bmatrix}a & b \\c & d\end{bmatrix}\cdot \begin{bmatrix}
x\\y \end{bmatrix}$$
$$\vec w = B\cdot (A\cdot \vec v)= (B\cdot A)\cdot \vec v$$
* 행렬곱 결합법칙
행렬곱은 결합법칙을 만족하는데 이는 그래픽 연산에서 계산량을 크게 줄이는 역할을 하여 유용하게 활용된다.

* 열기준 행렬, 행기준 행렬
수학에서 행렬을 다룰때는 벡터를 열벡터로 나태내는 열 기준 행렬 방식을 주로 사용하지만 컴퓨터에서는 행기준 행렬을 사용하는 경우가 있다.
이때는 벡터의 위치를 거꾸로 뒤집어 계산해야 행렬의 곱셈이 성립된다.
| 열기준 행렬 | 행기준 행렬 |
| $$\begin{bmatrix}a & b \\c & d \end{bmatrix} \cdot \begin{bmatrix} x \\ y \end{bmatrix} = \begin{bmatrix} ax + by \\ cx + dy \end{bmatrix}$$ | $$\begin{bmatrix} x & y \end{bmatrix} \cdot \begin{bmatrix} a & c \\b & d \end{bmatrix}= \begin{bmatrix} ax + by & cx + dy \end{bmatrix}$$ |
| OpenGL , Unity C# | DirectX , Unreal C++ |
열벡터와 행벡터는 서로 전치관계에 있기때문에 선형 변환 역시 전치 관계의 차이만 있다.
$$(A\cdot \vec v)^T =\vec v^T \cdot A^T$$
$$(\begin{bmatrix}a & b \\c & d \end{bmatrix} \cdot \begin{bmatrix} x \\ y \end{bmatrix})^T = \begin{bmatrix} x & y \end{bmatrix}^T \cdot \begin{bmatrix} a & c \\b & d \end{bmatrix}^T $$
'study > math' 카테고리의 다른 글
| [이득우 게임수학] 역행렬 (0) | 2024.06.30 |
|---|---|
| [이득우 게임수학] 행렬의 설계 (0) | 2024.06.26 |
| [이득우 게임수학] 선형성과 선형변환 (0) | 2024.06.09 |
| [이득우 게임수학] 삼각함수 (0) | 2024.05.24 |
| [이득우 게임수학] 벡터 (0) | 2024.05.16 |




댓글